

【Apollo学习笔记】——规划模块TASK之PATH_DECIDER


文章目录
在Apollo星火计划学习笔记——Apollo路径规划算法原理与实践与【Apollo学习笔记】——Planning模块讲到……Stage::Process的PlanOnReferenceLine函数会依次调用task_list中的TASK,本文将会继续以LaneFollow为例依次介绍其中的TASK部分究竟做了哪些工作。由于个人能力所限,文章可能有纰漏的地方,还请批评斧正。
在modules/planning/conf/scenario/lane_follow_config.pb.txt配置文件中,我们可以看到LaneFollow所需要执行的所有task。
stage_config: { stage_type: LANE_FOLLOW_DEFAULT_STAGE enabled: true task_type: LANE_CHANGE_DECIDER task_type: PATH_REUSE_DECIDER task_type: PATH_LANE_BORROW_DECIDER task_type: PATH_BOUNDS_DECIDER task_type: PIECEWISE_JERK_PATH_OPTIMIZER task_type: PATH_ASSESSMENT_DECIDER task_type: PATH_DECIDER task_type: RULE_BASED_STOP_DECIDER task_type: SPEED_BOUNDS_PRIORI_DECIDER task_type: SPEED_HEURISTIC_OPTIMIZER task_type: SPEED_DECIDER task_type: SPEED_BOUNDS_FINAL_DECIDER task_type: PIECEWISE_JERK_SPEED_OPTIMIZER # task_type: PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER task_type: RSS_DECIDER本文将继续介绍LaneFollow的第7个TASK——PATH_DECIDER
根据选出的路径给出对障碍物的决策
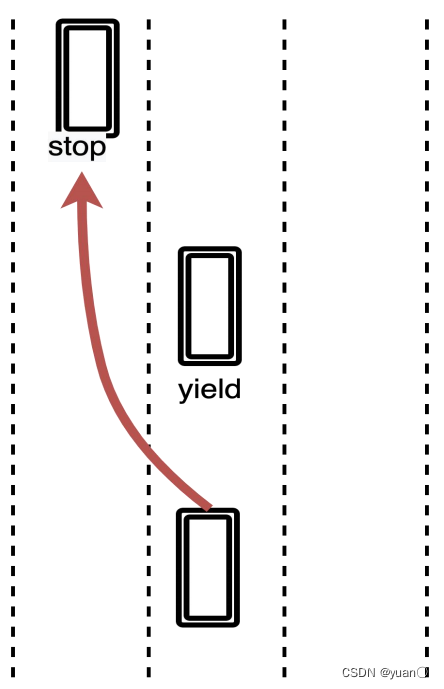 若是绕行的路径,则产生绕行的决策;若前方有障碍物阻塞,则产生停止的决策。
若是绕行的路径,则产生绕行的决策;若前方有障碍物阻塞,则产生停止的决策。
modules/planning/conf/planning_config.pb.txt
default_task_config: { task_type: PATH_DECIDER path_decider_config{ static_obstacle_buffer: 0.3 }}modules/planning/proto/task_config.proto
//// PathDeciderConfigmessage PathDeciderConfig { // buffer for static obstacles (meter) optional double static_obstacle_buffer = 1 [default = 0.3];}输入:
Status PathDecider::Process(const ReferenceLineInfo *reference_line_info,const PathData &path_data,PathDecision *const path_decision) {输出:
路径决策的信息都保存到了path_decision中。
路径决策代码流程及框架
在Process函数主要功能是调用了MakeObjectDecision函数。而在MakeObjectDecision函数中调用了MakeStaticObstacleDecision函数。
路径决策的主要功能都在MakeStaticObstacleDecision中。这部分代码还是比较清晰的。
Status PathDecider::Process(const ReferenceLineInfo *reference_line_info,const PathData &path_data,PathDecision *const path_decision) { // skip path_decider if reused path if (FLAGS_enable_skip_path_tasks && reference_line_info->path_reusable()) { return Status::OK(); } std::string blocking_obstacle_id; if (reference_line_info->GetBlockingObstacle() != nullptr) { blocking_obstacle_id = reference_line_info->GetBlockingObstacle()->Id(); } // 调用MakeObjectDecision函数 if (!MakeObjectDecision(path_data, blocking_obstacle_id, path_decision)) { const std::string msg = "Failed to make decision based on tunnel"; AERROR << msg; return Status(ErrorCode::PLANNING_ERROR, msg); } return Status::OK();}bool PathDecider::MakeObjectDecision(const PathData &path_data, const std::string &blocking_obstacle_id, PathDecision *const path_decision) { // path decider的主要功能在MakeStaticObstacleDecision中 if (!MakeStaticObstacleDecision(path_data, blocking_obstacle_id, path_decision)) { AERROR << "Failed to make decisions for static obstacles"; return false; } return true;}MakeStaticObstacleDecision
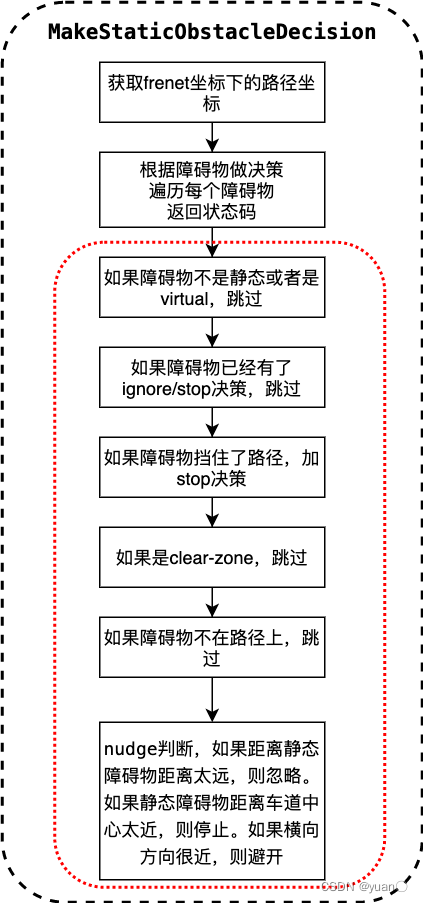
获取frenet坐标系下的坐标
... ... // 1.获取frenet坐标下的path路径 const auto &frenet_path = path_data.frenet_frame_path(); if (frenet_path.empty()) { AERROR << "Path is empty."; return false; } ... ...根据障碍物做决策
... ... // 2.遍历每个障碍物,做决策 for (const auto *obstacle : path_decision->obstacles().Items()) { const std::string &obstacle_id = obstacle->Id(); const std::string obstacle_type_name = PerceptionObstacle_Type_Name(obstacle->Perception().type()); ADEBUG << "obstacle_id[<< " << obstacle_id << "] type[" << obstacle_type_name << "]"; ... ...如果障碍物不是静态或virtual,则跳过
// 2.1 如果障碍物不是静态的或者是virtual的,就跳过 if (!obstacle->IsStatic() || obstacle->IsVirtual()) { // (stop fence,各种fence) continue; }如果障碍物有了ignore/stop决策,则跳过
// 2.2 如果障碍物已经有 ignore/stop 决策,就跳过 if (obstacle->HasLongitudinalDecision() && obstacle->LongitudinalDecision().has_ignore() && obstacle->HasLateralDecision() && obstacle->LateralDecision().has_ignore()) { continue; } if (obstacle->HasLongitudinalDecision() && obstacle->LongitudinalDecision().has_stop()) { // STOP decision continue; }如果障碍物挡住了路径,加stop决策
// 2.3 如果障碍物挡住了路径,加stop决策 if (obstacle->Id() == blocking_obstacle_id && !injector_->planning_context() ->planning_status() .path_decider() .is_in_path_lane_borrow_scenario()) { // Add stop decision ADEBUG << "Blocking obstacle = " << blocking_obstacle_id; ObjectDecisionType object_decision; *object_decision.mutable_stop() = GenerateObjectStopDecision(*obstacle); path_decision->AddLongitudinalDecision("PathDecider/blocking_obstacle", obstacle->Id(), object_decision); continue; }如果是clear-zone,跳过
// 2.4 如果是clear-zone,跳过 if (obstacle->reference_line_st_boundary().boundary_type() == STBoundary::BoundaryType::KEEP_CLEAR) { continue; }如果障碍物不在路径上,跳过
// 2.5 如果障碍物不在路径上,跳过 ObjectDecisionType object_decision; object_decision.mutable_ignore(); const auto &sl_boundary = obstacle->PerceptionSLBoundary(); if (sl_boundary.end_s() < frenet_path.front().s() || sl_boundary.start_s() > frenet_path.back().s()) { path_decision->AddLongitudinalDecision("PathDecider/not-in-s", obstacle->Id(), object_decision); path_decision->AddLateralDecision("PathDecider/not-in-s", obstacle->Id(), object_decision); continue; }nudge判断
- 如果距离静态障碍物距离太远,则忽略。
- 如果静态障碍物距离车道中心太近,则停止。
- 如果横向方向很近,则避开。
// 2.6 nudge判断,如果距离静态障碍物距离太远,则忽略。 // 如果静态障碍物距离车道中心太近,则停止。 // 如果横向方向很近,则避开。 if (curr_l - lateral_radius > sl_boundary.end_l() || curr_l + lateral_radius < sl_boundary.start_l()) { // 1. IGNORE if laterally too far away. path_decision->AddLateralDecision("PathDecider/not-in-l", obstacle->Id(), object_decision); } else if (sl_boundary.end_l() >= curr_l - min_nudge_l && sl_boundary.start_l() <= curr_l + min_nudge_l) { // 2. STOP if laterally too overlapping. *object_decision.mutable_stop() = GenerateObjectStopDecision(*obstacle); if (path_decision->MergeWithMainStop( object_decision.stop(), obstacle->Id(), reference_line_info_->reference_line(), reference_line_info_->AdcSlBoundary())) { path_decision->AddLongitudinalDecision("PathDecider/nearest-stop", obstacle->Id(), object_decision); } else { ObjectDecisionType object_decision; object_decision.mutable_ignore(); path_decision->AddLongitudinalDecision("PathDecider/not-nearest-stop", obstacle->Id(), object_decision); } } else { // 3. NUDGE if laterally very close. if (sl_boundary.end_l() < curr_l - min_nudge_l) { // && // sl_boundary.end_l() > curr_l - min_nudge_l - 0.3) { // LEFT_NUDGE ObjectNudge *object_nudge_ptr = object_decision.mutable_nudge(); object_nudge_ptr->set_type(ObjectNudge::LEFT_NUDGE); object_nudge_ptr->set_distance_l( config_.path_decider_config().static_obstacle_buffer()); path_decision->AddLateralDecision("PathDecider/left-nudge", obstacle->Id(), object_decision); } else if (sl_boundary.start_l() > curr_l + min_nudge_l) { // && // sl_boundary.start_l() < curr_l + min_nudge_l + 0.3) { // RIGHT_NUDGE ObjectNudge *object_nudge_ptr = object_decision.mutable_nudge(); object_nudge_ptr->set_type(ObjectNudge::RIGHT_NUDGE); object_nudge_ptr->set_distance_l( -config_.path_decider_config().static_obstacle_buffer()); path_decision->AddLateralDecision("PathDecider/right-nudge", obstacle->Id(), object_decision); } }GenerateObjectStopDecision主要用以生成停止决策。
ObjectStop PathDecider::GenerateObjectStopDecision( const Obstacle &obstacle) const { ObjectStop object_stop; // Calculate stop distance with the obstacle using the ADC's minimum turning radius double stop_distance = obstacle.MinRadiusStopDistance( VehicleConfigHelper::GetConfig().vehicle_param()); object_stop.set_reason_code(StopReasonCode::STOP_REASON_OBSTACLE); object_stop.set_distance_s(-stop_distance); // 停止时的参考位置 const double stop_ref_s = obstacle.PerceptionSLBoundary().start_s() - stop_distance; const auto stop_ref_point = reference_line_info_->reference_line().GetReferencePoint(stop_ref_s); object_stop.mutable_stop_point()->set_x(stop_ref_point.x()); object_stop.mutable_stop_point()->set_y(stop_ref_point.y()); object_stop.set_stop_heading(stop_ref_point.heading()); return object_stop;}对于停止距离的计算,会调用MinRadiusStopDistance函数,
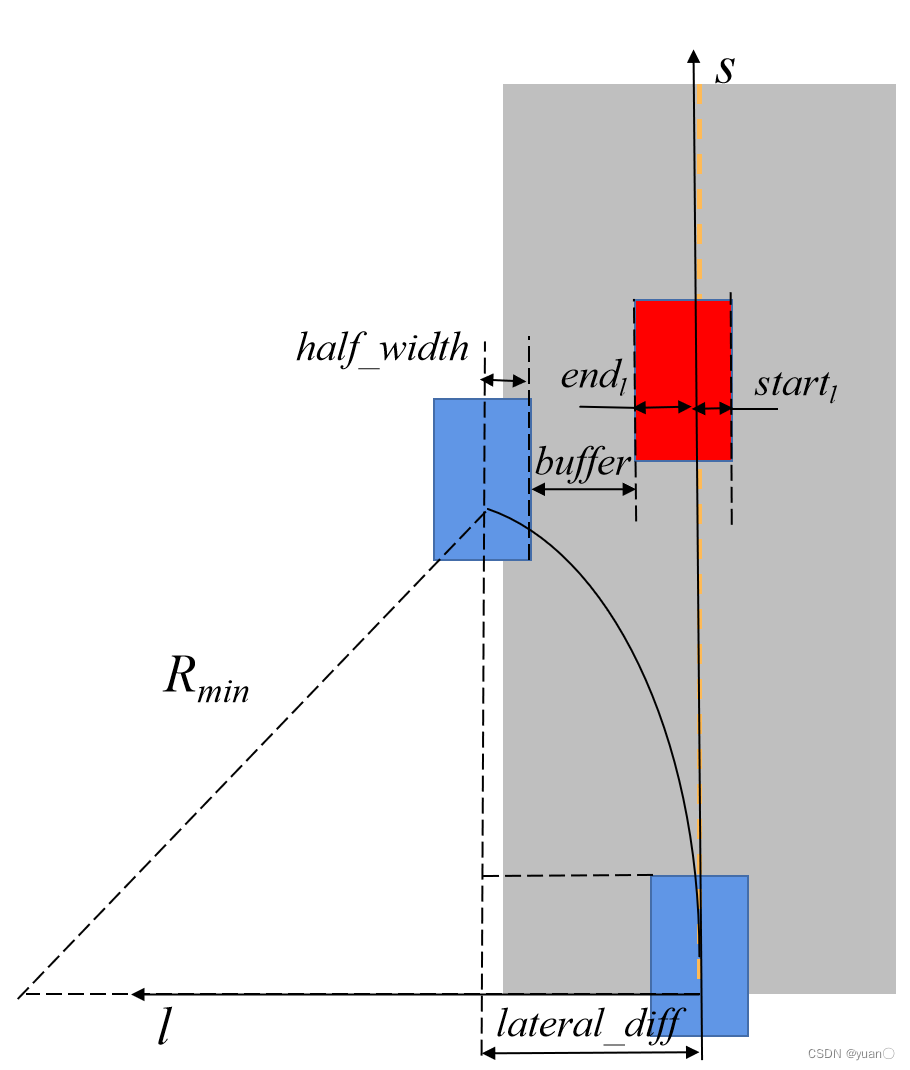
modules/planning/common/obstacle.cc
double Obstacle::MinRadiusStopDistance( const common::VehicleParam& vehicle_param) const { if (min_radius_stop_distance_ > 0) { return min_radius_stop_distance_; } // 定义一个停止距离的缓冲区0.5m static constexpr double stop_distance_buffer = 0.5; // 获取最小安全转弯半径 const double min_turn_radius = VehicleConfigHelper::MinSafeTurnRadius(); // 计算横向距离 double lateral_diff = vehicle_param.width() / 2.0 + std::max(std::fabs(sl_boundary_.start_l()), std::fabs(sl_boundary_.end_l())); const double kEpison = 1e-5; lateral_diff = std::min(lateral_diff, min_turn_radius - kEpison); // 勾股定理求得停止距离 double stop_distance = std::sqrt(std::fabs(min_turn_radius * min_turn_radius - (min_turn_radius - lateral_diff) * (min_turn_radius - lateral_diff))) + stop_distance_buffer; // 减掉车辆前端到后轴中心的距离 stop_distance -= vehicle_param.front_edge_to_center(); // 限幅 stop_distance = std::min(stop_distance, FLAGS_max_stop_distance_obstacle); // 10.0 stop_distance = std::max(stop_distance, FLAGS_min_stop_distance_obstacle); // 6.0 return stop_distance;}计算示意图如下:
modules/common/configs/vehicle_config_helper.cc
double VehicleConfigHelper::MinSafeTurnRadius() { const auto ¶m = vehicle_config_.vehicle_param(); double lat_edge_to_center = std::max(param.left_edge_to_center(), param.right_edge_to_center()); double lon_edge_to_center = std::max(param.front_edge_to_center(), param.back_edge_to_center()); return std::sqrt((lat_edge_to_center + param.min_turn_radius()) * (lat_edge_to_center + param.min_turn_radius()) + lon_edge_to_center * lon_edge_to_center);}MinSafeTurnRadius这段函数是获取当车辆以最大转向角转弯时的最大安全转弯半径。具体计算参考下图:
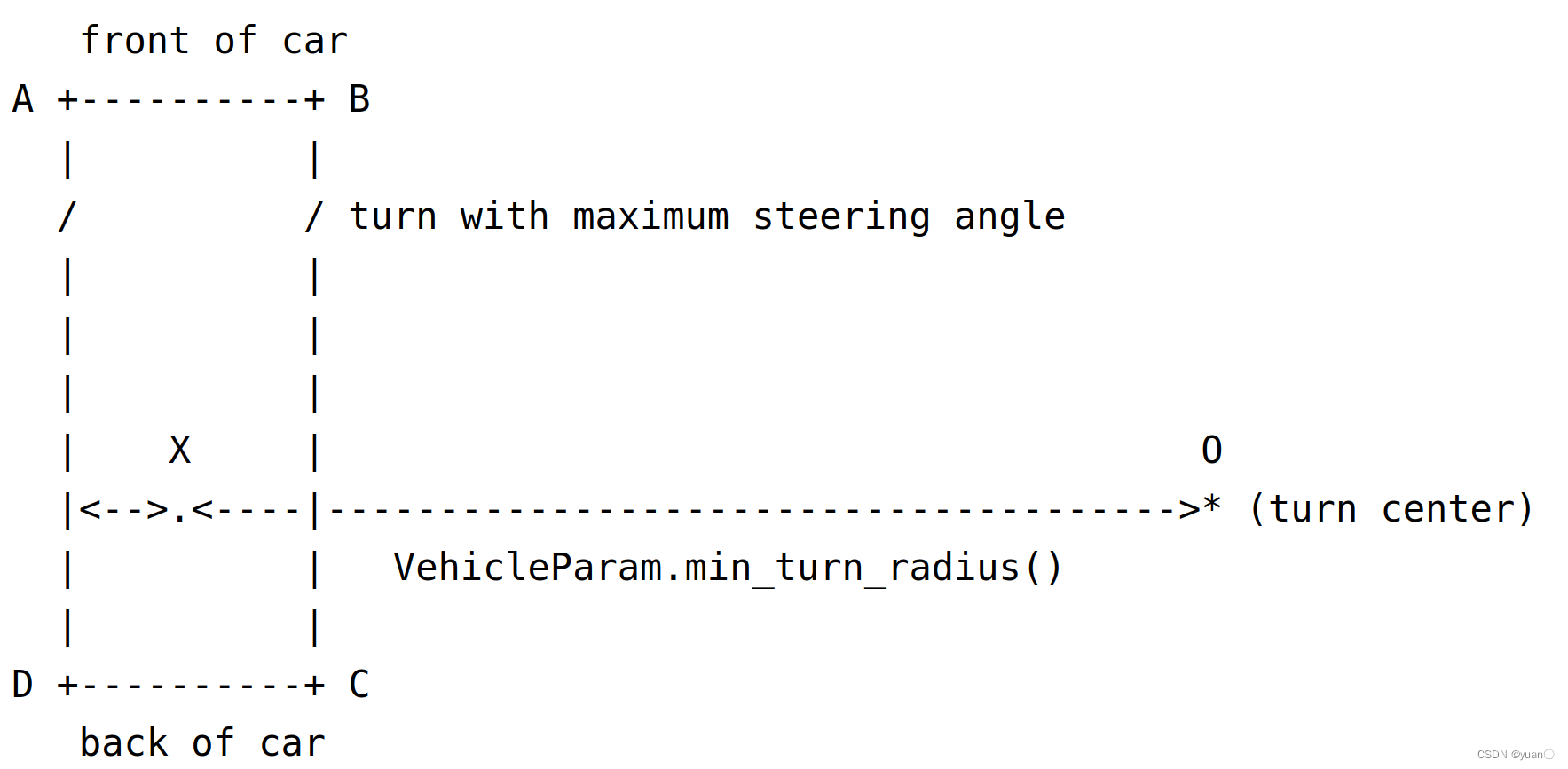
A , B , C , D A,B,C,D A,B,C,D分别是车辆的四个角, X O XO XO是车辆的最小转弯半径VehicleParam.min_turn_radius(), X X X与 A D AD AD之间的距离是左边缘到中心的距离left_edge_to_center, X X X与 A B AB AB之间的距离是前边缘到中心的距离front_edge_to_center。最大安全转弯半径则是 A O AO AO,定义中心到横向边缘最长的距离为 l l a t l_{lat} llat,到纵向边缘最长的距离为 l l o n l_{lon} llon, A O AO AO计算公式如下:
AO= ( X O + l l a t ) 2 + l l o n 2 AO=\sqrt{(XO+l_{lat})^2+{l_{lon}}^2} AO=(XO+llat)2+llon2
个人感觉这么做是为了获得足够的安全冗余量。
[1] 路径决策
来源地址:https://blog.csdn.net/sinat_52032317/article/details/132549818
免责声明:
① 本站未注明“稿件来源”的信息均来自网络整理。其文字、图片和音视频稿件的所属权归原作者所有。本站收集整理出于非商业性的教育和科研之目的,并不意味着本站赞同其观点或证实其内容的真实性。仅作为临时的测试数据,供内部测试之用。本站并未授权任何人以任何方式主动获取本站任何信息。
② 本站未注明“稿件来源”的临时测试数据将在测试完成后最终做删除处理。有问题或投稿请发送至: 邮箱/279061341@qq.com QQ/279061341












