

路径规划 | 图解Lazy Theta*算法(附ROS C++/Python/Matlab仿真)

目录
0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。
🚀详情:图解自动驾驶中的运动规划(Motion Planning),附几十种规划算法
1 Theta*算法局限性
Theta*的运行瓶颈在于,每次扩展节点 v v v的邻节点 w w w时,都需要对 parent ( v ) \mathrm{parent}(v) parent(v)和 w w w进行一次Bresenham视线检测。然而,大部分邻节点最终不会被扩展,大量应用在视线检测上的计算资源被浪费。
Theta*的变种算法Lazy Theta*算法通过延迟评估技术提升Theta*的路径搜索速度。实验证明,在26邻域三维地图上,Lazy Theta*的视线检查数量比Theta*减少了一个数量级,且路径长度没有增加。
2 Lazy Theta*算法原理
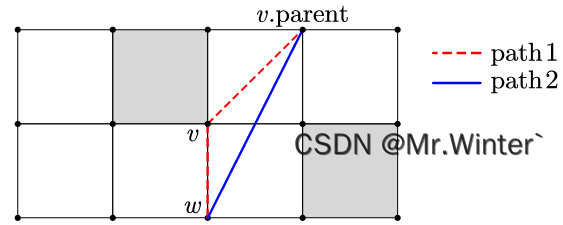
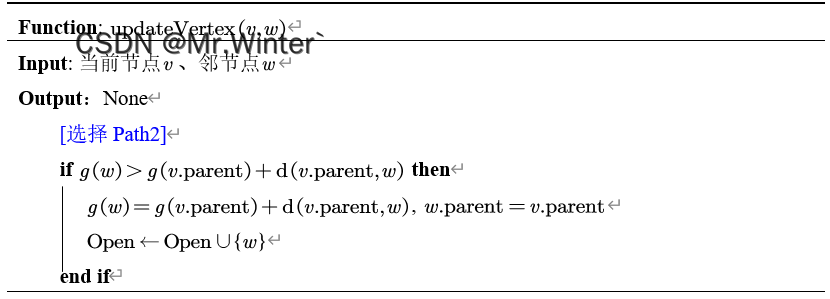
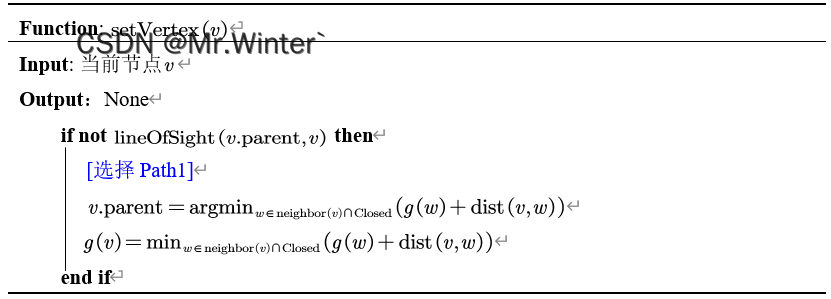
Lazy Theta*在扩展节点 v v v的邻节点 w w w时,默认 parent ( v ) \mathrm{parent}(v) parent(v)和 w w w间存在视线,而无需对 parent ( v ) \mathrm{parent}(v) parent(v)和 w w w进行碰撞检测。当以节点 w w w为基础开始扩展时,才正式对它与父节点 parent ( v ) \mathrm{parent}(v) parent(v)计算视线。若视线存在,则无需更新信息(path2);若视线不存在,则在邻域重新选择父节点(path1)。
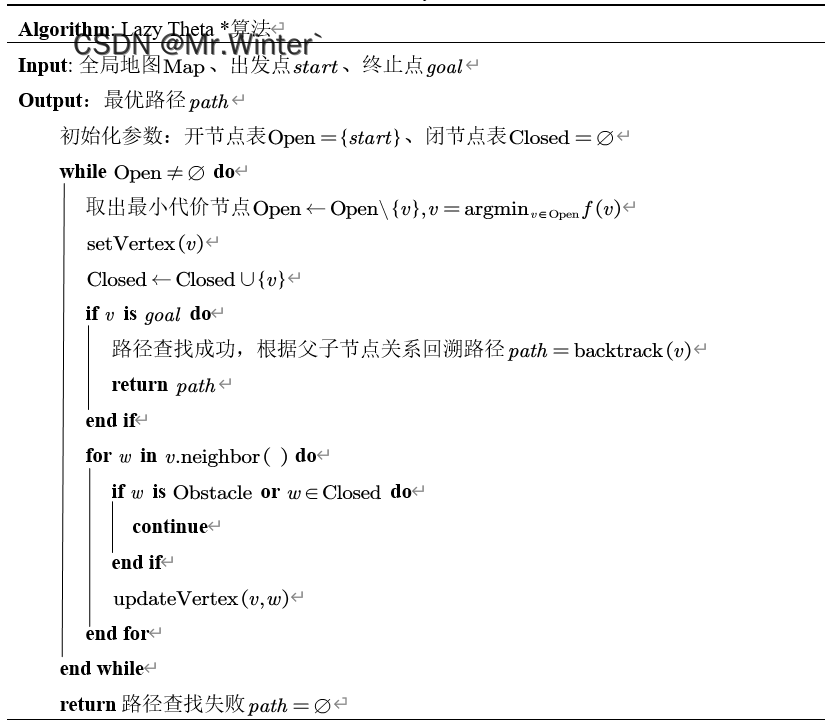
Lazy Theta*的算法流程如下所示。
3 Theta* VS. Lazy Theta*
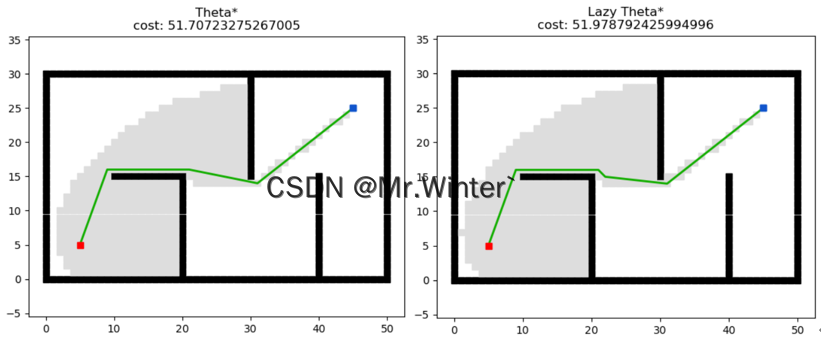
Lazy Theta*牺牲了一定的路径优度,因为节点 v v v与其父节点间可能存在障碍,使节点 v v v的 g g g值往往小于真实值,导致从Open表中取出的优先节点可能并非最优的,所以Lazy Theta*的规划路径可能会更长。同时,当判定节点 与其父节点间存在障碍后, v v v的父节点只能从邻域中更新,可能产生锯齿。Theta*与Lazy Theta*的对比实例如下
4 仿真实现
4.1 ROS C++实现
核心代码如下
bool LazyThetaStar::plan(const unsigned char* global_costmap, const Node& start, const Node& goal, std::vector<Node>& path, std::vector<Node>& expand){ // initialize costs_ = global_costmap; closed_list_.clear(); path.clear(); expand.clear(); motion_ = getMotion(); // push the start node into open list std::priority_queue<Node, std::vector<Node>, compare_cost> open_list; open_list.push(start); // main process while (!open_list.empty()) { // pop current node from open list Node current = open_list.top(); open_list.pop(); _setVertex(current); if (current.g_ >= INFINITE_COST) continue; // current node does not exist in closed list if (closed_list_.find(current) != closed_list_.end()) continue; closed_list_.insert(current); expand.push_back(current); // goal found if (current == goal) { path = _convertClosedListToPath(closed_list_, start, goal); return true; } // explore neighbor of current node for (const auto& m : motion_) { // explore a new node // path 1 Node node_new = current + m; // add the x_, y_, g_ node_new.h_ = dist(node_new, goal); node_new.id_ = grid2Index(node_new.x_, node_new.y_); node_new.pid_ = current.id_; // current node do not exist in closed list if (closed_list_.find(node_new) != closed_list_.end()) continue; // next node hit the boundary or obstacle if ((node_new.id_ < 0) || (node_new.id_ >= ns_) || (costs_[node_new.id_] >= lethal_cost_ * factor_)) continue; // get parent node Node parent; parent.id_ = current.pid_; index2Grid(parent.id_, parent.x_, parent.y_); auto find_parent = closed_list_.find(parent); if (find_parent != closed_list_.end()) { parent = *find_parent; // path 2 _updateVertex(parent, node_new); } open_list.push(node_new); } } return false;}
4.2 Python实现
核心代码如下
def plan(self):# OPEN set with priority and CLOSED setOPEN = []heapq.heappush(OPEN, self.start)CLOSED = []while OPEN: node = heapq.heappop(OPEN) # set vertex: path 1 try: ... except: pass # exists in CLOSED set if node in CLOSED: continue # goal found if node == self.goal: CLOSED.append(node) return self.extractPath(CLOSED), CLOSED for node_n in self.getNeighbor(node): # exists in CLOSED set if node_n in CLOSED: continue # path1 node_n.parent = node.current node_n.h = self.h(node_n, self.goal) try: p_index = CLOSED.index(Node(node.parent)) node_p = CLOSED[p_index] except: node_p = None if node_p: # path2 self.updateVertex(node_p, node_n) # goal found if node_n == self.goal: heapq.heappush(OPEN, node_n) break # update OPEN set heapq.heappush(OPEN, node_n) CLOSED.append(node)return ([], []), []4.3 Matlab实现
核心代码如下
while ~isempty(OPEN) % pop f = OPEN(:, 3) + OPEN(:, 4); [~, index] = min(f); cur_node = OPEN(index, :); OPEN(index, :) = []; % set vertex: path 1 p_index = loc_list(cur_node(5: 6), CLOSED, [1, 2]); ... % exists in CLOSED set if loc_list(cur_node, CLOSED, [1, 2]) continue end % update expand zone if ~loc_list(cur_node, EXPAND, [1, 2]) EXPAND = [EXPAND; cur_node(1:2)]; end % goal found if cur_node(1) == goal(1) && cur_node(2) == goal(2) CLOSED = [cur_node; CLOSED]; goal_reached = true; cost = cur_node(3); break end if (cur_node(1) ==17) &&(cur_node(2) == 26) cur_node(1); end % explore neighbors for i = 1:motion_num % path 1 node_n = [ cur_node(1) + motion(i, 1), ... cur_node(2) + motion(i, 2), ... cur_node(3) + motion(i, 3), ... 0, ... cur_node(1), cur_node(2)]; node_n(4) = h(node_n(1:2), goal); % exists in CLOSED set if loc_list(node_n, CLOSED, [1, 2]) continue end % obstacle if map(node_n(1), node_n(2)) == 2 continue end p_index = loc_list(cur_node(5: 6), CLOSED, [1, 2]); if p_index node_p = CLOSED(p_index, :); else node_p = 0; end if node_p ~= 0 node_n = update_vertex(node_p, node_n); end % update OPEN set OPEN = [OPEN; node_n]; end CLOSED = [cur_node; CLOSED];end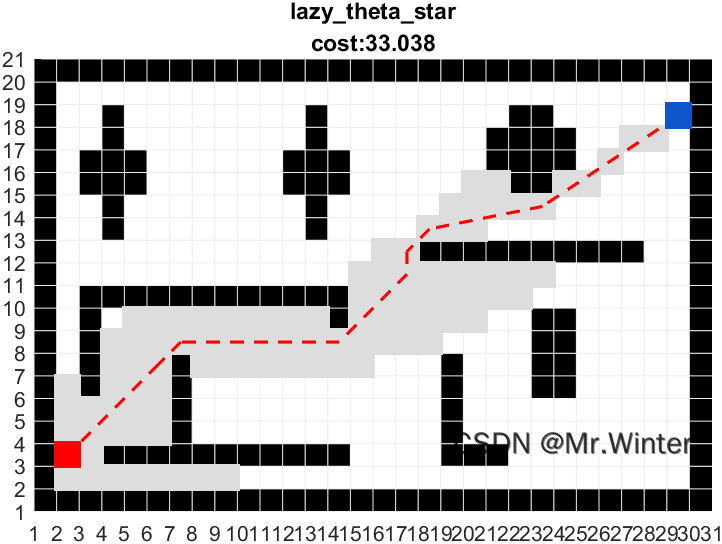
完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
来源地址:https://blog.csdn.net/FRIGIDWINTER/article/details/132620431
免责声明:
① 本站未注明“稿件来源”的信息均来自网络整理。其文字、图片和音视频稿件的所属权归原作者所有。本站收集整理出于非商业性的教育和科研之目的,并不意味着本站赞同其观点或证实其内容的真实性。仅作为临时的测试数据,供内部测试之用。本站并未授权任何人以任何方式主动获取本站任何信息。
② 本站未注明“稿件来源”的临时测试数据将在测试完成后最终做删除处理。有问题或投稿请发送至: 邮箱/279061341@qq.com QQ/279061341












